6.s081-note06-interrupts
真实操作系统内存使用情况
下图是一台Athena计算机(注,MIT内部共享使用的计算机)的top指令输出。如果你查看Mem这一行,
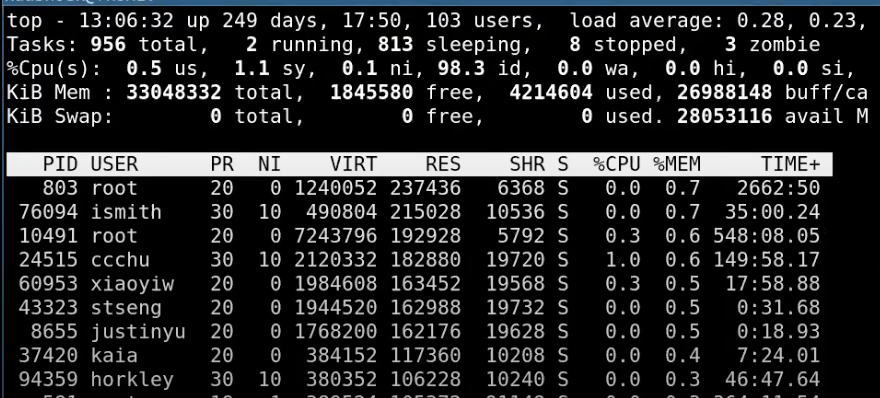
首先是计算机中总共有多少内存(33048332),如果你再往后看的话,你会发现大部分内存都被使用了(4214604 + 26988148)。但是大部分内存并没有被应用程序所使用,而是被buff/cache用掉了。这在一个操作系统中还挺常见的,因为我们不想让物理内存就在那闲置着,我们想让物理内存被用起来,所以这里大块的内存被用作buff/cache。可以看到还有一小块内存是空闲的(1845580),但是并不多。
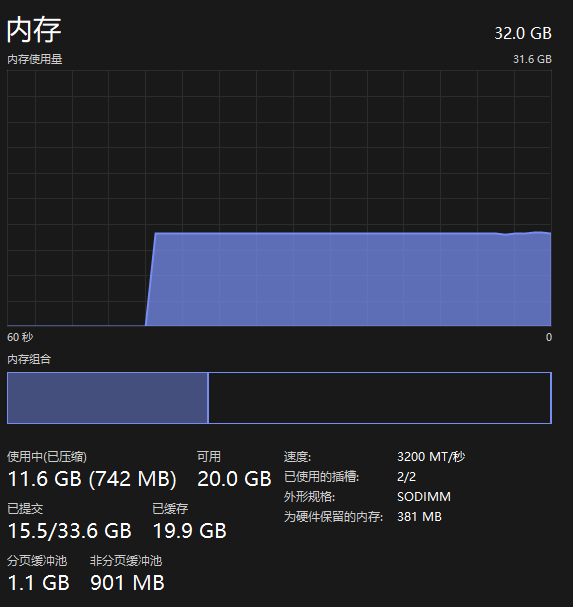
当然,在Win上也能看到缓存的物理内存。
以上是一个非常常见的场景,大部分操作系统运行时几乎没有任何空闲的内存。这意味着,如果应用程序或者内核需要使用新的内存,那么我们需要丢弃一些已有的内容。现在的空闲内存(free)或许足够几个page用,但是在某个时间点如果需要大量内存的话,要么是从应用程序,要么是从buffer/cache中,需要撤回已经使用的一部分内存。所以,当内核在分配内存的时候,通常都不是一个低成本的操作,因为并不总是有足够的可用内存,为了分配内存需要先撤回一些内存。
另外,我这里将top的输出按照RES进行了排序。如果你查看输出的每一行,VIRT表示的是虚拟内存地址空间的大小,RES是实际使用的内存数量。从这里可以看出,实际使用的内存数量远小于地址空间的大小。所以,我们上节课讨论的基于虚拟内存和page fault提供的非常酷的功能在这都有使用,比如说demand paging。
有关这台机器的其它信息还有:
-
即使它有103个用户登录进来了,它的负载还是很低
-
它有许多许多的进程
-
这台机器已经运行了249天,我们的XV6系统或许运行不了这么久
这里想传达的信息:大部分内存都被使用了,并且RES内存远小于VIRT内存。
Interrupt硬件部分
今天课程的主要内容是中断。中断对应的场景很简单,就是硬件想要得到操作系统的关注。例如网卡收到了一个packet,网卡会生成一个中断;用户通过键盘按下了一个按键,键盘会产生一个中断。操作系统需要做的是,保存当前的工作,处理中断,处理完成之后再恢复之前的工作。这里的保存和恢复工作,与我们之前看到的系统调用过程(注,详见lec06)非常相似。所以系统调用,page fault,中断,都使用相同的机制。
但是中断又有一些不一样的地方,这就是为什么我们要花一节课的时间来讲它。中断与系统调用主要有3个小的差别:
-
asynchronous。当硬件生成中断时,Interrupt handler与当前运行的进程在CPU上没有任何关联。但如果是系统调用的话,系统调用发生在运行进程的context下。
-
concurrency。我们这节课会稍微介绍并发,在下一节课,我们会介绍更多并发相关的内容。对于中断来说,CPU和生成中断的设备是并行的在运行。网卡自己独立的处理来自网络的packet,然后在某个时间点产生中断,但是同时,CPU也在运行。所以我们在CPU和设备之间是真正的并行的,我们必须管理这里的并行。
-
program device。我们这节课主要关注外部设备,例如网卡,UART,而这些设备需要被编程。每个设备都有一个编程手册,就像RISC-V有一个包含了指令和寄存器的手册一样。设备的编程手册包含了它有什么样的寄存器,它能执行什么样的操作,在读写控制寄存器的时候,设备会如何响应。不过通常来说,设备的手册不如RISC-V的手册清晰,这会使得对于设备的编程会更加复杂。
我们这节课的内容非常的简单。我们会讨论
-
console中的提示符“$ ”是如何显示出来的
-
如果你在键盘输入“ls”,这些字符是怎么最终在console中显示出来的。
我们首先要关心的是,中断是从哪里产生的?因为我们主要关心的是外部设备的中断,而不是定时器中断或者软件中断。外设中断来自于主板上的设备,下图是一个SiFive主板,如果你查看这个主板,你可以发现有大量的设备连接在或者可以连接到这个主板上。
主板可以连接以太网卡,MicroUSB,MicroSD等,主板上的各种线路将外设和CPU连接在一起。这节课的大部分内容都会介绍当设备产生中断时CPU会发生什么,以及如何从设备读写数据。
下图是来自于SiFive有关处理器的文档,图中的右侧是各种各样的设备,例如UART0。我们在之前的课程已经知道UART0会映射到内核内存地址的某处,而所有的物理内存都映射在地址空间的0x80000000之上。(注,详见4.5)。类似于读写内存,通过向相应的设备地址执行load/store指令,我们就可以对例如UART的设备进行编程。
所有的设备都连接到处理器上,处理器上是通过Platform Level Interrupt Control,简称PLIC来处理设备中断。PLIC会管理来自于外设的中断。如果我们再进一步深入的查看PLIC的结构图,
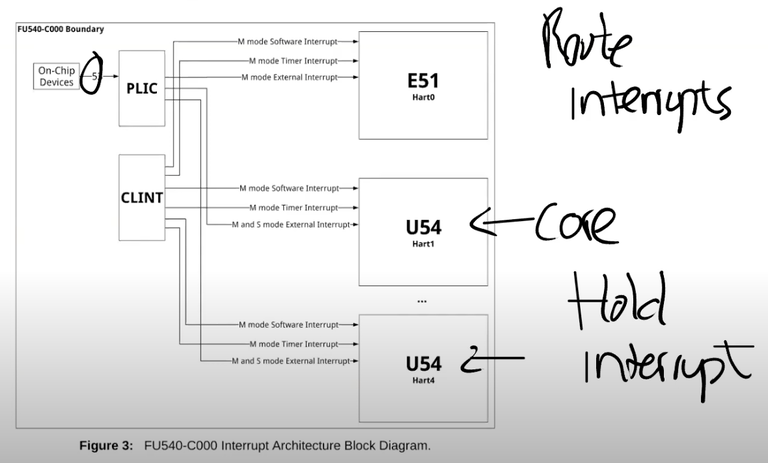
从左上角可以看出,我们有53个不同的来自于设备的中断。这些中断到达PLIC之后,PLIC会路由这些中断。图的右下角是CPU的核,PLIC会将中断路由到某一个CPU的核。如果所有的CPU核都正在处理中断,PLIC会保留中断直到有一个CPU核可以用来处理中断。所以PLIC需要保存一些内部数据来跟踪中断的状态。
如果你看过了文档,这里的具体流程是:
-
PLIC会通知当前有一个待处理的中断
-
其中一个CPU核会Claim接收中断,这样PLIC就不会把中断发给其他的CPU处理
-
CPU核处理完中断之后,CPU会通知PLIC
-
PLIC将不再保存中断的信息
- PLIC有没有什么机制能确保中断一定被处理?
-
这里取决于内核以什么样的方式来对PLIC进行编程。PLIC只是分发中断,而内核需要对PLIC进行编程来告诉它中断应该分发到哪。实际上,内核可以对中断优先级进行编程,这里非常的灵活。
- 当UART触发中断的时候,所有的CPU核都能收到中断吗?
- 取决于你如何对PLIC进行编程。对于XV6来说,所有的CPU都能收到中断,但是只有一个CPU会Claim相应的中断。
设备驱动概述
通常来说,管理设备的代码称为驱动,所有的驱动都在内核中。我们今天要看的是UART设备的驱动,代码在uart.c文件中。如果我们查看代码的结构,我们可以发现大部分驱动都分为两个部分,bottom/top。
bottom部分通常是Interrupt handler。当一个中断送到了CPU,并且CPU设置接收这个中断,CPU会调用相应的Interrupt handler。Interrupt handler并不运行在任何特定进程的context中,它只是处理中断。
top部分,是用户进程,或者内核的其他部分调用的接口。对于UART来说,这里有read/write接口,这些接口可以被更高层级的代码调用。
通常情况下,驱动中会有一些队列(或者说buffer),top部分的代码会从队列中读写数据,而Interrupt handler(bottom部分)同时也会向队列中读写数据。这里的队列可以将并行运行的设备和CPU解耦开来。
在很多操作系统中,驱动代码加起来可能会比内核还要大,主要是因为,对于每个设备,你都需要一个驱动,而设备又很多。
接下来我们看一下如何对设备进行编程。通常来说,编程是通过memory mapped I/O完成的。在SiFive的手册中,设备地址出现在物理地址的特定区间内,这个区间由主板制造商决定。操作系统需要知道这些设备位于物理地址空间的具体位置,然后再通过普通的load/store指令对这些地址进行编程。load/store指令实际上的工作就是读写设备的控制寄存器。例如,对网卡执行store指令时,CPU会修改网卡的某个控制寄存器,进而导致网卡发送一个packet。所以这里的load/store指令不会读写内存,而是会操作设备。 并且你需要阅读设备的文档来弄清楚设备的寄存器和相应的行为,有的时候文档很清晰,有的时候文档不是那么清晰.
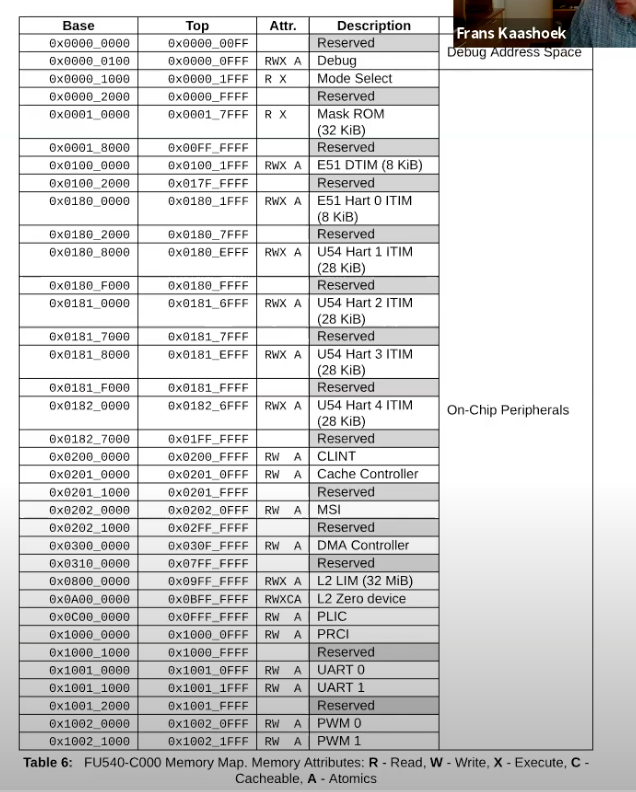
例如,0x2000000对应CLINT,0xC000000对应的是PLIC。在这个图中UART0对应的是0x1001__0000,但是在QEMU中,我们的UART0的地址略有不同,因为在QEMU中我们并不是完全的模拟SiFive主板,而是模拟与SiFive主板非常类似的东西。
以上就是Memory-mapped IO。
下图是UART的文档。16550是QEMU模拟的UART设备,QEMU用这个模拟的设备来与键盘和Console进行交互。
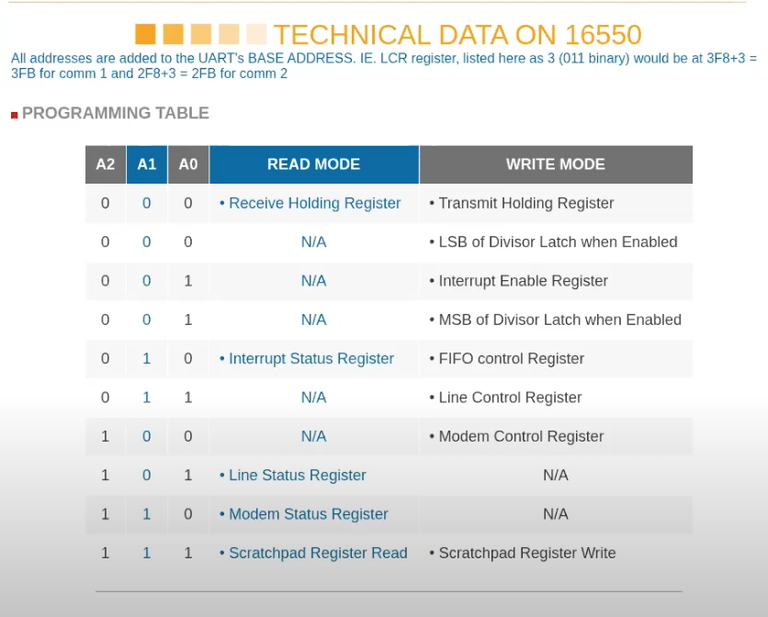
这是一个很简单的芯片,图中表明了芯片拥有的寄存器。例如对于控制寄存器000,如果写它会将数据写入到寄存器中并被传输到其他地方,如果读它可以读出存储在寄存器中的内容。UART可以让你能够通过串口发送数据bit,在线路的另一侧会有另一个UART芯片,能够将数据bit组合成一个个Byte。
这里还有一些其他可以控制的地方,例如控制寄存器001,可以通过它来控制UART是否产生中断。实际上对于一个寄存器,其中的每个bit都有不同的作用。例如对于寄存器001,也就是IER寄存器,bit0-bit3分别控制了不同的中断。这个文档还有很多内容,但是对于我们这节课来说,上图就足够了。不过即使是这么简单的一个设备,它的文档也有很多页。
- 如果你写入数据到Transmit Holding Register,然后再次写入,那么前一个数据不会被覆盖掉吗?
- 这是我们需要注意的一件事情。我们通过load将数据写入到这个寄存器中,之后UART芯片会通过串口线将这个Byte送出。当完成了发送,UART会生成一个中断给内核,这个时候才能再次写入下一个数据。所以内核和设备之间需要遵守一些协议才能确保一切工作正常。上图中的UART芯片会有一个容量是16的FIFO,但是你还是要小心,因为如果阻塞了16个Byte之后再次写入还是会造成数据覆盖。
在XV6中设置中断
当XV6启动时,Shell会输出提示符“$ ”,如果我们在键盘上输入ls,最终可以看到“$ ls”。我们接下来通过研究Console是如何显示出“$ ls”,来看一下设备中断是如何工作的。
实际上“$ ”和“ls”还不太一样,“$ ”是Shell程序的输出,而“ls”是用户通过键盘输入之后再显示出来的。
对于“$ ”来说,实际上就是设备会将字符传输给UART的寄存器,UART之后会在发送完字符之后产生一个中断。在QEMU中,模拟的线路的另一端会有另一个UART芯片(模拟的),这个UART芯片连接到了虚拟的Console,它会进一步将“$ ”显示在console上。
另一方面,对于“ls”,这是用户输入的字符。键盘连接到了UART的输入线路,当你在键盘上按下一个按键,UART芯片会将按键字符通过串口线发送到另一端的UART芯片。另一端的UART芯片先将数据bit合并成一个Byte,之后再产生一个中断,并告诉处理器说这里有一个来自于键盘的字符。之后Interrupt handler会处理来自于UART的字符。我们接下来会深入通过这两部分来弄清楚这里是如何工作的。
RISC-V有许多与中断相关的寄存器:
-
SIE(Supervisor Interrupt Enable)寄存器。这个寄存器中有一个bit(E)专门针对例如UART的外部设备的中断;有一个bit(S)专门针对软件中断,软件中断可能由一个CPU核触发给另一个CPU核;还有一个bit(T)专门针对定时器中断。我们这节课只关注外部设备的中断。
-
SSTATUS(Supervisor Status)寄存器。这个寄存器中有一个bit来打开或者关闭中断。每一个CPU核都有独立的SIE和SSTATUS寄存器,除了通过SIE寄存器来单独控制特定的中断,还可以通过SSTATUS寄存器中的一个bit来控制所有的中断。
-
SIP(Supervisor Interrupt Pending)寄存器。当发生中断时,处理器可以通过查看这个寄存器知道当前是什么类型的中断。
-
SCAUSE寄存器,这个寄存器我们之前看过很多次。它会表明当前状态的原因是中断。
-
STVEC寄存器,它会保存当trap,page fault或者中断发生时,CPU运行的用户程序的程序计数器,这样才能在稍后恢复程序的运行。
我们今天不会讨论SCAUSE和STVEC寄存器,因为在中断处理流程中,它们基本上与之前(注,lec06)的工作方式是一样的。接下来我们看看XV6是如何对其他寄存器进行编程,使得CPU处于一个能接受中断的状态。
接下来看看代码,首先是位于start.c的start函数。
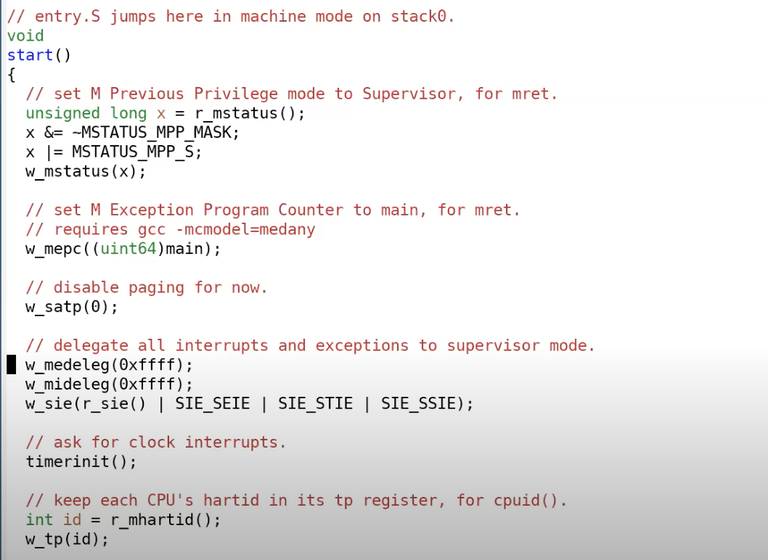
这里将所有的中断都设置在Supervisor mode,然后设置SIE寄存器来接收External,软件和定时器中断,之后初始化定时器。
接下来我们看一下main函数中是如何处理External中断。
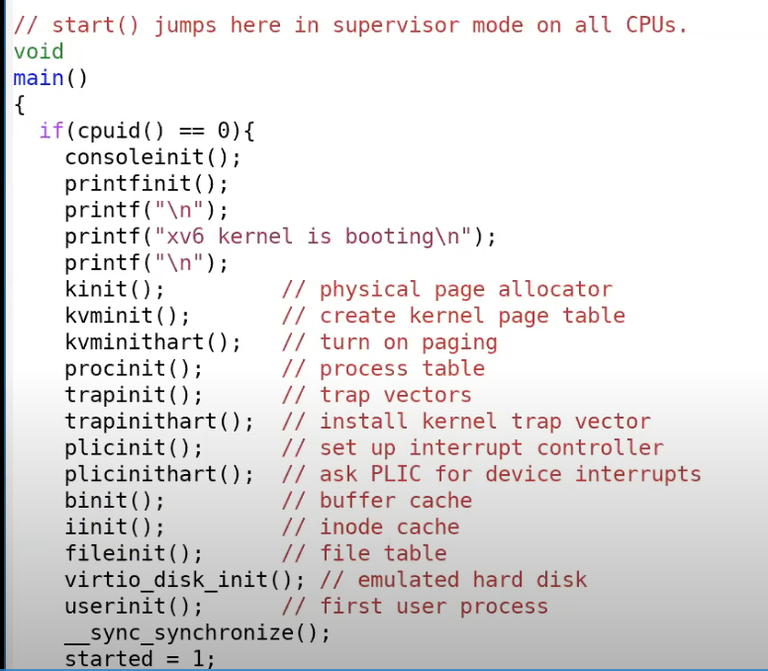
我们第一个外设是console,这是我们print的输出位置。查看位于console.c的consoleinit函数。
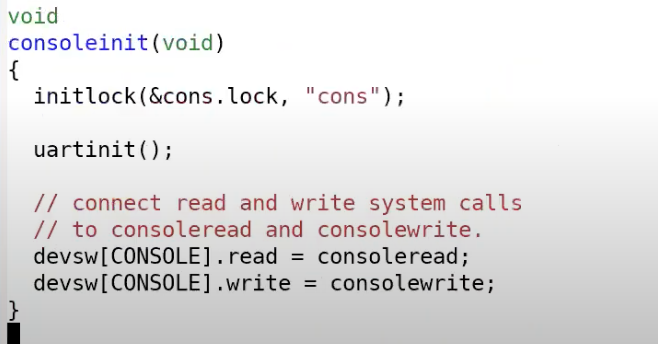
这里首先初始化了锁,我们现在还不关心这个锁。然后调用了uartinit,uartinit函数位于uart.c文件。这个函数实际上就是配置好UART芯片使其可以被使用。
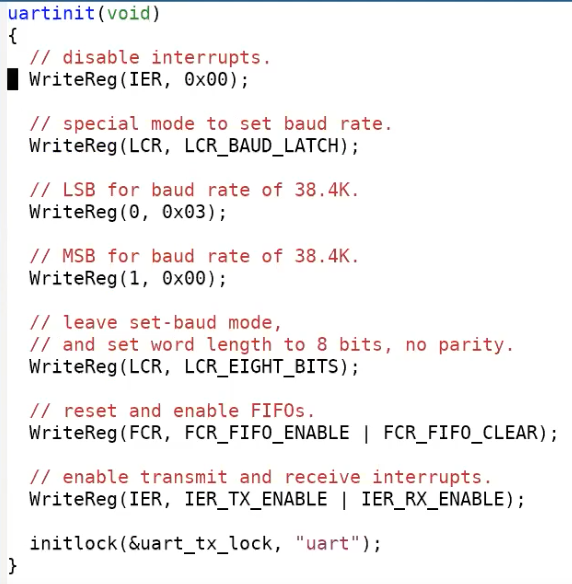
这里的流程是先关闭中断,之后设置波特率,设置字符长度为8bit,重置FIFO,最后再重新打开中断。
什么是波特率?
这是串口线的传输速率。
以上就是uartinit函数,运行完这个函数之后,原则上UART就可以生成中断了。但是因为我们还没有对PLIC编程,所以中断不能被CPU感知。最终,在main函数中,需要调用plicinit函数。下图是plicinit函数。
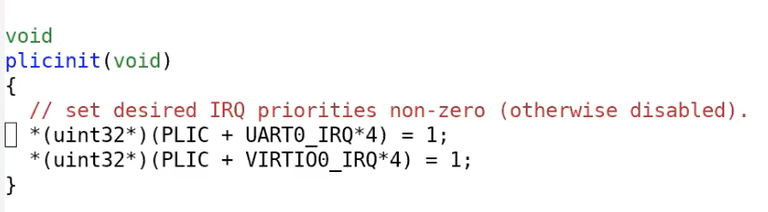
PLIC与外设一样,也占用了一个I/O地址(0xC000_0000)。代码的第一行使能了UART的中断,这里实际上就是设置PLIC会接收哪些中断,进而将中断路由到CPU。类似的,代码的第二行设置PLIC接收来自IO磁盘的中断,我们这节课不会介绍这部分内容。
main函数中,plicinit之后就是plicinithart函数。plicinit是由0号CPU运行,之后,每个CPU的核都需要调用plicinithart函数表明对于哪些外设中断感兴趣。
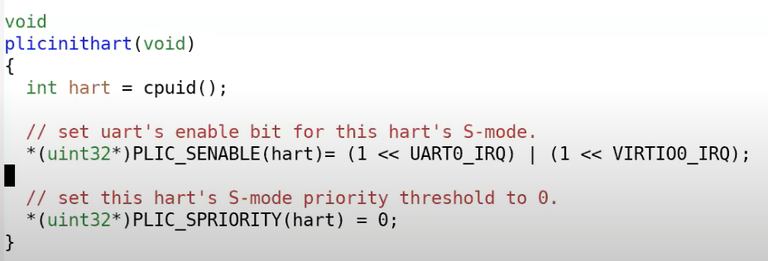
所以在plicinithart函数中,每个CPU的核都表明自己对来自于UART和VIRTIO的中断感兴趣。因为我们忽略中断的优先级,所以我们将优先级设置为0。
到目前为止,我们有了生成中断的外部设备,我们有了PLIC可以传递中断到单个的CPU。但是CPU自己还没有设置好接收中断,因为我们还没有设置好SSTATUS寄存器。在main函数的最后,程序调用了scheduler函数,
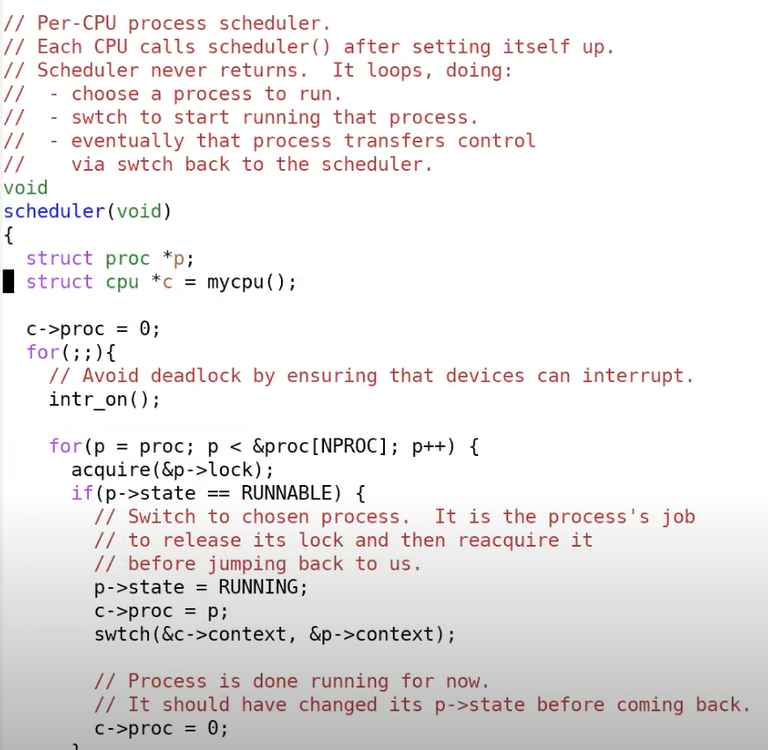
scheduler函数主要是运行进程。但是在实际运行进程之前,会执行intr_on函数来使得CPU能接收中断。
intr_on函数只完成一件事情,就是设置SSTATUS寄存器,打开中断标志位。
在这个时间点,中断被完全打开了。如果PLIC正好有pending的中断,那么这个CPU核会收到中断。
以上就是中断的基本设置。
- 哪些核在intr_on之后打开了中断?
- 任何一个调用了intr_on的CPU核,都会接收中断。实际上所有的CPU核都会运行intr_on函数。
UART驱动的top部分
接下来我想看一下如何从Shell程序输出提示符“$ ”到Console。首先我们看init.c中的main函数,这是系统启动后运行的第一个进程。
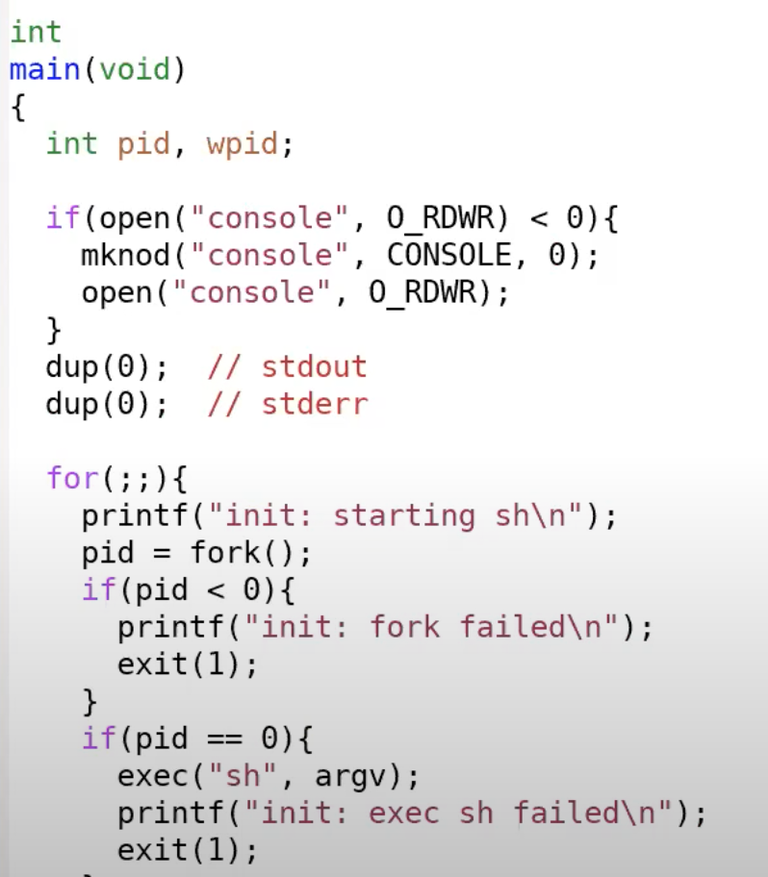
首先这个进程的main函数创建了一个代表Console的设备。这里通过mknod操作创建了console设备。因为这是第一个打开的文件,所以这里的文件描述符0。之后通过dup创建stdout和stderr。这里实际上通过复制文件描述符0,得到了另外两个文件描述符1,2。最终文件描述符0,1,2都用来代表Console。
Shell程序首先打开文件描述符0,1,2。之后Shell向文件描述符2打印提示符“$ ”。
尽管Console背后是UART设备,但是从应用程序来看,它就像是一个普通的文件。Shell程序只是向文件描述符2写了数据,它并不知道文件描述符2对应的是什么。在Unix系统中,设备是由文件表示。我们来看一下这里的fprintf是如何工作的。
在printf.c文件中,代码只是调用了write系统调用,在我们的例子中,fd对应的就是文件描述符2,c是字符“$”。
所以由Shell输出的每一个字符都会触发一个write系统调用。之前我们已经看过了write系统调用最终会走到sysfile.c文件的sys_write函数。
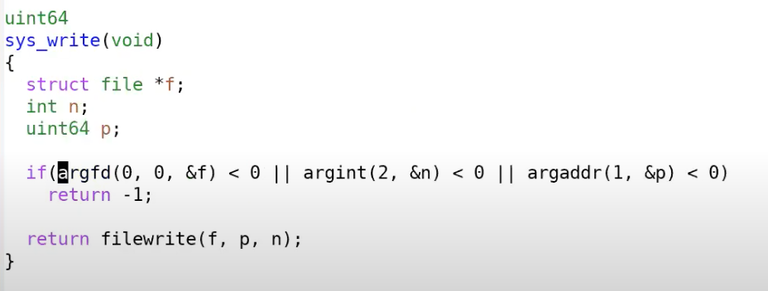
这个函数中首先对参数做了检查,然后又调用了filewrite函数。filewrite函数位于file.c文件中。
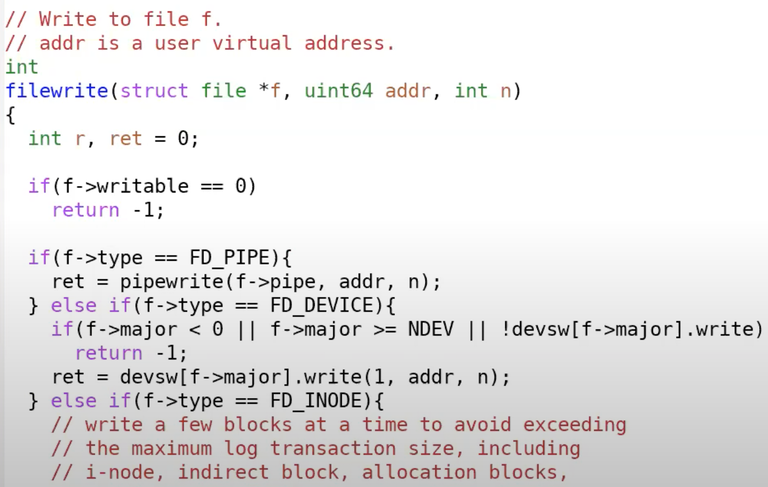
在filewrite函数中首先会判断文件描述符的类型。mknod生成的文件描述符属于设备(FD_DEVICE),而对于设备类型的文件描述符,我们会为这个特定的设备执行设备相应的write函数。因为我们现在的设备是Console,所以我们知道这里会调用console.c中的consolewrite函数。
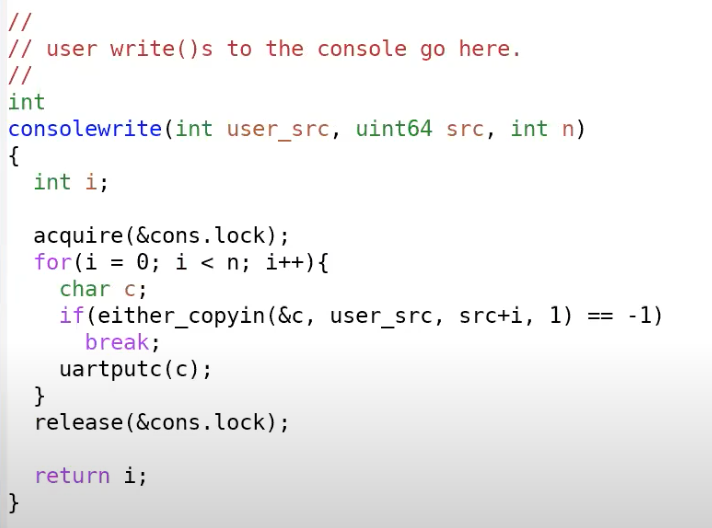
这里先通过either_copyin将字符拷入,之后调用uartputc函数。uartputc函数将字符写入给UART设备,所以你可以认为consolewrite是一个UART驱动的top部分。uart.c文件中的uartputc函数会实际的打印字符。
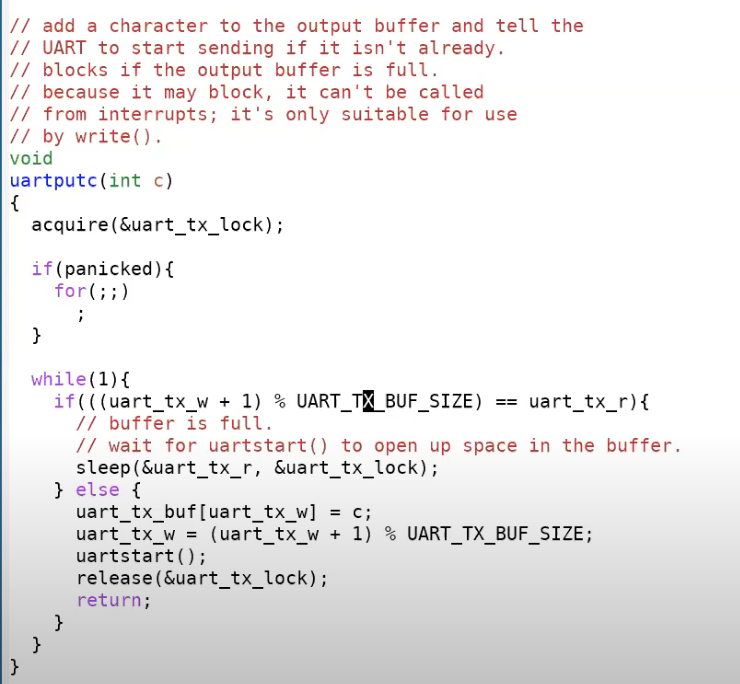
uartputc函数会稍微有趣一些。在UART的内部会有一个buffer用来发送数据,buffer的大小是32个字符。同时还有一个为consumer提供的读指针和为producer提供的写指针,来构建一个环形的buffer(注,或者可以认为是环形队列)。

在我们的例子中,Shell是producer,所以需要调用uartputc函数。在函数中第一件事情是判断环形buffer是否已经满了。如果读写指针相同,那么buffer是空的,如果写指针加1等于读指针,那么buffer满了。当buffer是满的时候,向其写入数据是没有意义的,所以这里会sleep一段时间,将CPU出让给其他进程。当然,对于我们来说,buffer必然不是满的,因为提示符“$”是我们送出的第一个字符。所以代码会走到else,字符会被送到buffer中,更新写指针,之后再调用uartstart函数。
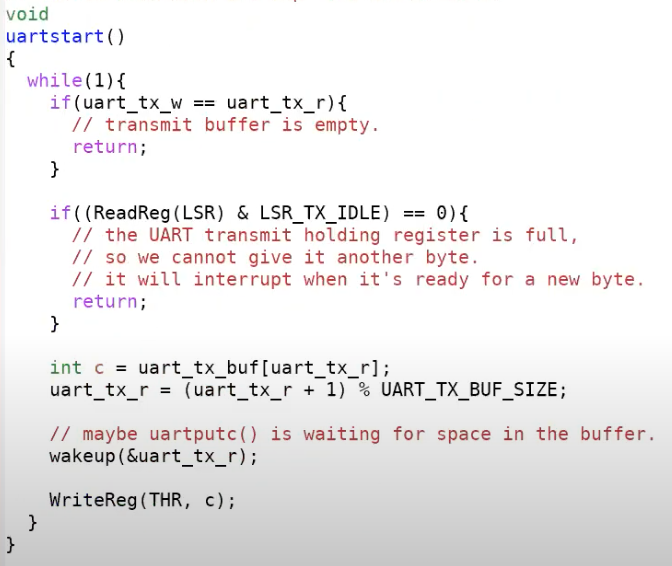
uartstart就是通知设备执行操作。首先是检查当前设备是否空闲,如果空闲的话,我们会从buffer中读出数据,然后将数据写入到THR(Transmission Holding Register)发送寄存器。这里相当于告诉设备,我这里有一个字节需要你来发送。一旦数据送到了设备,系统调用会返回,用户应用程序Shell就可以继续执行。这里从内核返回到用户空间的机制与lec06的trap机制是一样的。
与此同时,UART设备会将数据送出。在某个时间点,我们会收到中断,因为我们之前设置了要处理UART设备中断。接下来我们看一下,当发生中断时,实际会发生什么。
UART驱动的bottom部分
在我们向Console输出字符时,如果发生了中断,RISC-V会做什么操作?我们之前已经在SSTATUS寄存器中打开了中断,所以处理器会被中断。假设键盘生成了一个中断并且发向了PLIC,PLIC会将中断路由给一个特定的CPU核,并且如果这个CPU核设置了SIE寄存器的E bit(注,针对外部中断的bit位),那么会发生以下事情:
-
首先,会清除SIE寄存器相应的bit,这样可以阻止CPU核被其他中断打扰,该CPU核可以专心处理当前中断。处理完成之后,可以再次恢复SIE寄存器相应的bit。
-
之后,会设置SEPC寄存器为当前的程序计数器。我们假设Shell正在用户空间运行,突然来了一个中断,那么当前Shell的程序计数器会被保存。
-
之后,要保存当前的mode。在我们的例子里面,因为当前运行的是Shell程序,所以会记录user mode。
-
再将mode设置为Supervisor mode。
-
最后将程序计数器的值设置成STVEC的值。(注,STVEC用来保存trap处理程序的地址,详见lec06)在XV6中,STVEC保存的要么是uservec或者kernelvec函数的地址,具体取决于发生中断时程序运行是在用户空间还是内核空间。在我们的例子中,Shell运行在用户空间,所以STVEC保存的是uservec函数的地址。而从之前的课程我们可以知道uservec函数会调用usertrap函数。所以最终,我们在usertrap函数中。我们这节课不会介绍trap过程中的拷贝,恢复过程,因为在之前的课程中已经详细的介绍过了。
接下来看一下trap.c文件中的usertrap函数,我们在lec06和lec08分别在这个函数中处理了系统调用和page fault。今天我们将要看一下如何处理中断。
在trap.c的devintr函数中,首先会通过SCAUSE寄存器判断当前中断是否是来自于外设的中断。如果是的话,再调用plic_claim函数来获取中断。
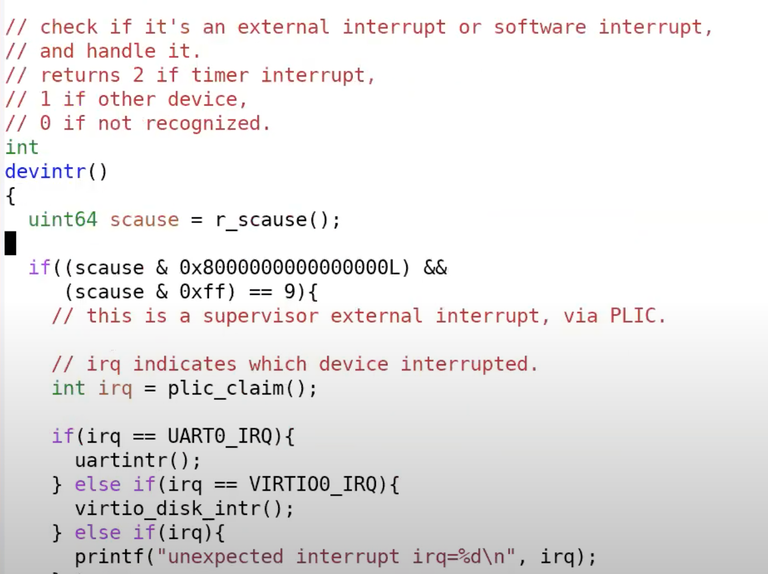
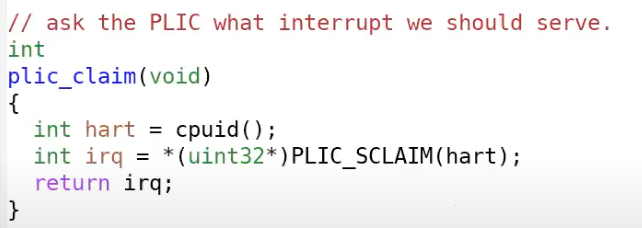
plic_claim函数位于plic.c文件中。在这个函数中,当前CPU核会告知PLIC,自己要处理中断,PLIC_SCLAIM会将中断号返回,对于UART来说,返回的中断号是10。
从devintr函数可以看出,如果是UART中断,那么会调用uartintr函数。位于uart.c文件的uartintr函数,会从UART的接受寄存器中读取数据,之后将获取到的数据传递给consoleintr函数。哦,不好意思,我搞错了。我们现在讨论的是向UART发送数据。因为我们现在还没有通过键盘输入任何数据,所以UART的接受寄存器现在为空。
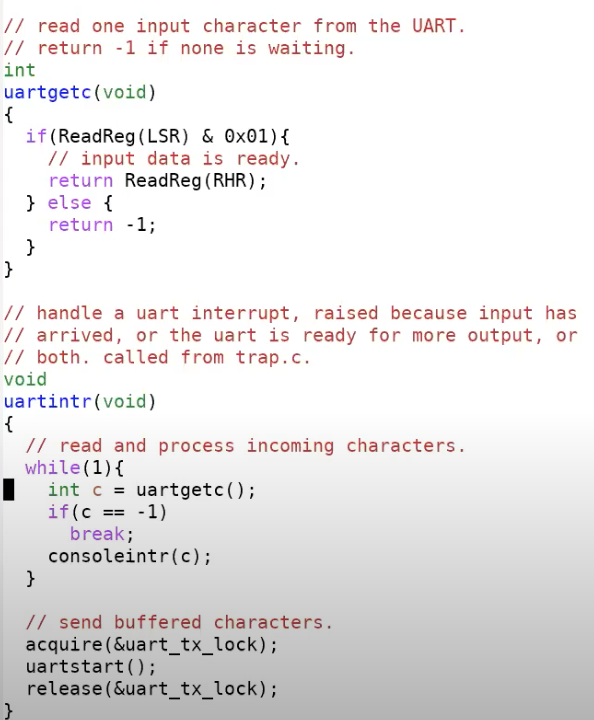
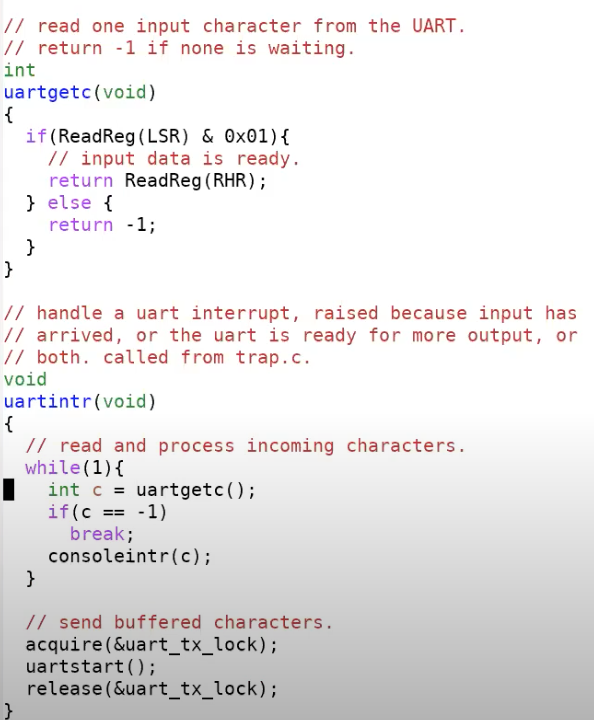
所以代码会直接运行到uartstart函数,这个函数会将Shell存储在buffer中的任意字符送出。实际上在提示符$ 之后,Shell还会输出一个空格字符,write系统调用可以在UART发送提示符“ $的同时,并发的将空格字符写入到buffer中。所以UART的发送中断触发时,可以发现在buffer中还有一个空格字符,之后会将这个空格字符送出。
这样,驱动的top部分和bottom部分就解耦开了。
- UART对于键盘来说很重要,来自于键盘的字符通过UART走到CPU再到我们写的代码。但是我不太理解UART对于Shell输出字符究竟有什么作用?因为在这个场景中,并没有键盘的参与。
-
显示设备与UART也是相连的。所以UART连接了两个设备,一个是键盘,另一个是显示设备,也就是Console。QEMU也是通过模拟的UART与Console进行交互,而Console的作用就是将字符在显示器上画出来。
- uartinit只被调用了一次,所以才导致了所有的CPU核都共用一个buffer吗?
- 因为只有一个UART设备,一个buffer只针对一个UART设备,而这个buffer会被所有的CPU核共享,这样运行在多个CPU核上的多个程序可以同时向Console打印输出,而驱动中是通过锁来确保多个CPU核上的程序串行的向Console打印输出。
- 我们之所以需要锁是因为有多个CPU核,但是却只有一个Console,对吧?
- 是的,如我们之前说的驱动的top和bottom部分可以并行的运行。所以一个CPU核可以执行uartputc函数,而另个一CPU核可以执行uartintr函数,我们需要确保它们是串行执行的,而锁确保了这一点。
- 那是不是意味着,某个时间,其他所有的CPU核都需要等待某一个CPU核的处理?
- 这里并不是死锁。其他的CPU核还是可以在等待的时候运行别的进程。
Interrupt相关的并发
接下来我们讨论一下与中断相关的并发,并发加大了中断编程的难度。这里的并发包括以下几个方面:
-
设备与CPU是并行运行的。例如当UART向Console发送字符的时候,CPU会返回执行Shell,而Shell可能会再执行一次系统调用,向buffer中写入另一个字符,这些都是在并行的执行。这里的并行称为producer-consumer并行。
-
中断会停止当前运行的程序。例如,Shell正在运行第212个指令,突然来了个中断,Shell的执行会立即停止。对于用户空间代码,这并不是一个大的问题,因为当我们从中断中返回时,我们会恢复用户空间代码,并继续执行执行停止的指令。我们已经在trap和page fault中看过了这部分内容。但是当内核被中断打断时,事情就不一样了。所以,代码运行在kernel mode也会被中断,这意味着即使是内核代码,也不是直接串行运行的。在两个内核指令之间,取决于中断是否打开,可能会被中断打断执行。对于一些代码来说,如果不能在执行期间被中断,这时内核需要临时关闭中断,来确保这段代码的原子性。
-
驱动的top和bottom部分是并行运行的。例如,Shell会在传输完提示符“$”之后再调用write系统调用传输空格字符,代码会走到UART驱动的top部分(注,uartputc函数),将空格写入到buffer中。但是同时在另一个CPU核,可能会收到来自于UART的中断,进而执行UART驱动的bottom部分,查看相同的buffer。所以一个驱动的top和bottom部分可以并行的在不同的CPU上运行。这里我们通过lock来管理并行。因为这里有共享的数据,我们想要buffer在一个时间只被一个CPU核所操作。
这里我将会关注在第一点,也就是producer/consumser并发。这是驱动中的非常常见的典型现象。如你们所见的,在驱动中会有一个buffer,在我们之前的例子中,buffer是32字节大小。并且有两个指针,分别是读指针和写指针。
如果两个指针相等,那么buffer是空的。当Shell调用uartputc函数时,会将字符,例如提示符“$”,写入到写指针的位置,并将写指针加1。这就是producer对于buffer的操作。
producer可以一直写入数据,直到写指针 + 1等于读指针,因为这时,buffer已经满了。当buffer满了的时候,producer必须停止运行。我们之前在uartputc函数中看过,如果buffer满了,代码会sleep,暂时搁置Shell并运行其他的进程。
Interrupt handler,也就是uartintr函数,在这个场景下是consumer,每当有一个中断,并且读指针落后于写指针,uartintr函数就会从读指针中读取一个字符再通过UART设备发送,并且将读指针加1。当读指针追上写指针,也就是两个指针相等的时候,buffer为空,这时就不用做任何操作。
- 这里的buffer对于所有的CPU核都是共享的吗?
-
这里的buffer存在于内存中,并且只有一份,所以,所有的CPU核都并行的与这一份数据交互。所以我们才需要lock。
- 对于uartputc中的sleep,它怎么知道应该让Shell去sleep?
- sleep会将当前在运行的进程存放于sleep数据中。它传入的参数是需要等待的信号,在这个例子中传入的是uart_tx_r的地址。在uartstart函数中,一旦buffer中有了空间,会调用与sleep对应的函数wakeup,传入的也是uart_tx_r的地址。任何等待在这个地址的进程都会被唤醒。有时候这种机制被称为conditional synchronization。
以上就是Shell输出提示符“$ ”的全部内容。如你们所见,过程还挺复杂的,许多代码一起工作才将这两个字符传输到了Console。
UART读取键盘输入
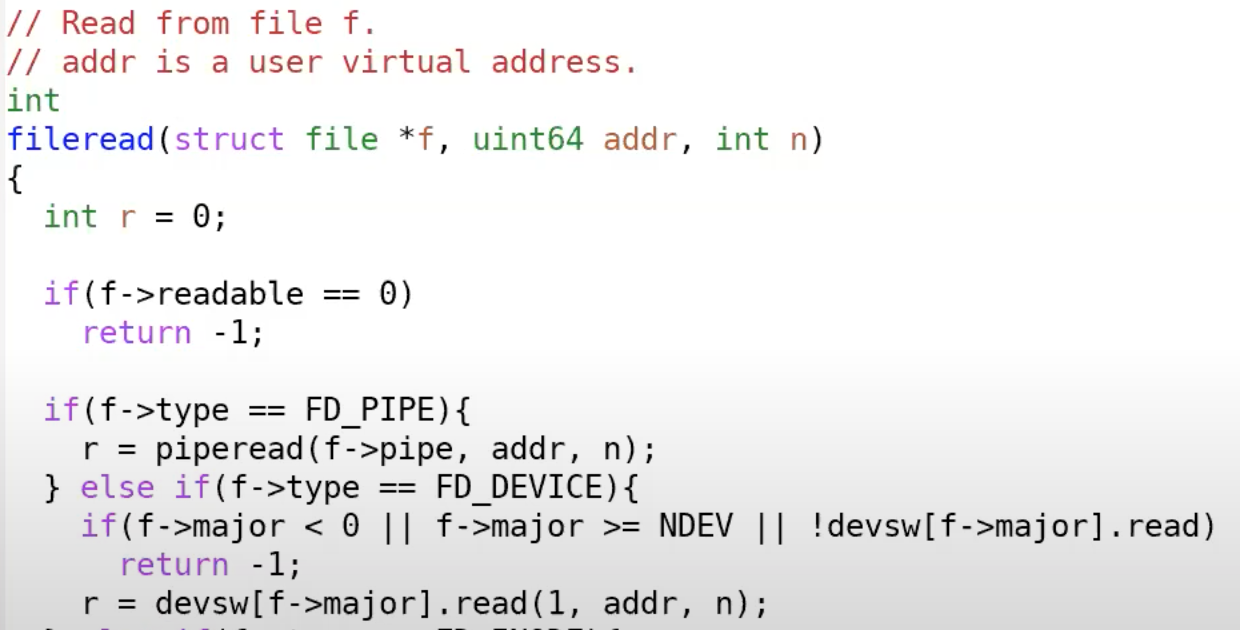
在UART的另一侧,会有类似的事情发生,有时Shell会调用read从键盘中读取字符。 在read系统调用的底层,会调用fileread函数。在这个函数中,如果读取的文件类型是设备,会调用相应设备的read函数。
在我们的例子中,read函数就是console.c文件中的consoleread函数。
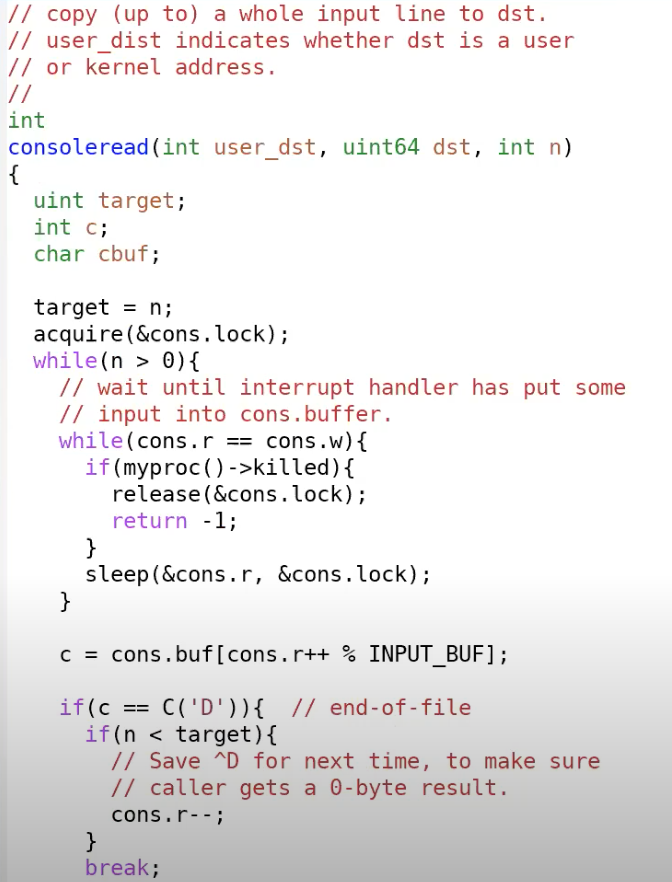
这里与UART类似,也有一个buffer,包含了128个字符。其他的基本一样,也有producer和consumser。但是在这个场景下Shell变成了consumser,因为Shell是从buffer中读取数据。而键盘是producer,它将数据写入到buffer中。
从consoleread函数中可以看出,当读指针和写指针一样时,说明buffer为空,进程会sleep。所以Shell在打印完“$ ”之后,如果键盘没有输入,Shell进程会sleep,直到键盘有一个字符输入。所以在某个时间点,假设用户通过键盘输入了“l”,这会导致“l”被发送到主板上的UART芯片,产生中断之后再被PLIC路由到某个CPU核,之后会触发devintr函数,devintr可以发现这是一个UART中断,然后通过uartgetc函数获取到相应的字符,之后再将字符传递给consoleintr函数。
默认情况下,字符会通过consputc,输出到console上给用户查看。之后,字符被存放在buffer中。在遇到换行符的时候,唤醒之前sleep的进程,也就是Shell,再从buffer中将数据读出。
所以这里也是通过buffer将consumer和producer之间解耦,这样它们才能按照自己的速度,独立的并行运行。如果某一个运行的过快了,那么buffer要么是满的要么是空的,consumer和producer其中一个会sleep并等待另一个追上来。
Interrupt的演进
最后我想介绍一下Interrupt在最近几十年的演进。当Unix刚被开发出来的时候,Interrupt处理还是很快的。这使得硬件可以很简单,当外设有数据需要处理时,硬件可以中断CPU的执行,并让CPU处理硬件的数据。
而现在,中断相对处理器来说变慢了。从前面的介绍可以看出来这一点,需要很多步骤才能真正的处理中断数据。如果一个设备在高速的产生中断,处理器将会很难跟上。所以如果查看现在的设备,可以发现,现在的设备相比之前做了更多的工作。所以在产生中断之前,设备上会执行大量的操作,这样可以减轻CPU的处理负担。所以现在硬件变得更加复杂。
如果你有一个高性能的设备,例如你有一个千兆网卡,这个网卡收到了大量的小包,网卡每秒可以生成1.5Mpps,这意味着每一个微秒,CPU都需要处理一个中断,这就超过了CPU的处理能力。那么当网卡收到大量包,并且处理器不能处理这么多中断的时候该怎么办呢?
这里的解决方法就是使用polling。除了依赖Interrupt,CPU可以一直读取外设的控制寄存器,来检查是否有数据。对于UART来说,我们可以一直读取RHR寄存器,来检查是否有数据。现在,CPU不停的在轮询设备,直到设备有了数据。
这种方法浪费了CPU cycles,当我们在使用CPU不停的检查寄存器的内容时,我们并没有用CPU来运行任何程序。在我们之前的例子中,如果没有数据,内核会让Shell进程sleep,这样可以运行另一个进程。
所以,对于一个慢设备,你肯定不想一直轮询它来得到数据。我们想要在没有数据的时候切换出来运行一些其他程序。但是如果是一个快设备,那么Interrupt的overhead也会很高,那么我们在polling设备的时候,是经常能拿到数据的,这样可以节省进出中断的代价。
所以对于一个高性能的网卡,如果有大量的包要传入,那么应该用polling。对于一些精心设计的驱动,它们会在polling和Interrupt之间动态切换(注,也就是网卡的NAPI)。